I am working on the construction of a geometry, which involves the union of two geometric shapes. Currently, my code is as follows:
G4double ZLCN[2] = {330*mm, 780*mm}; // zhi-wai
G4double WLCN[2] = {330*mm, 3000*mm}; // wan-wai
G4Tubs* solidZLCN = new G4Tubs("ZLCN", 0, ZLCN[0]/2*mm, ZLCN[1]/2*mm, 0, 2*PI);
G4Tubs* solidWLCN = new G4Tubs("WLCN", 0, WLCN[0]/2*mm, WLCN[1]/2*mm, 0, 2*PI);
G4RotationMatrix* yRot = new G4RotationMatrix;
yRot->rotateY(M_PI/4.*rad);
yRot->rotateX(M_PI/4.*rad);
G4ThreeVector yTrans(0*cm,0*cm, 0*cm);
G4UnionSolid* unionMoved = new G4UnionSolid("unionMoved", solidZLCN, solidWLCN, yRot, yTrans);
G4LogicalVolume* sunionMoved = new G4LogicalVolume(unionMoved, StainlessSteel, "sunionMoved");
G4RotationMatrix *rot = new G4RotationMatrix();
rot->rotateX(90.0*deg);
G4VPhysicalVolume* physUnion = new G4PVPlacement(rot,
G4ThreeVector(-27.075*cm, 30*cm,0*cm),
sunionMoved,
"pIntestine",
logicWorld,
false,
0,
checkOverlaps);
Question 1: I would like to know whether the operations of G4ThreeVector are based on the new coordinate axis after movement or the original world coordinate axis.
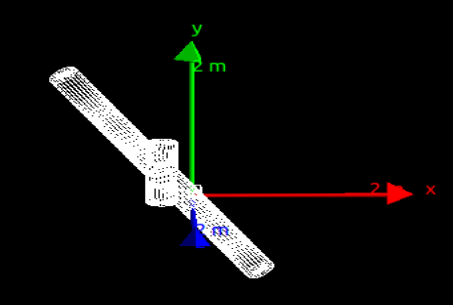
Question 2: I want to achieve the requirement as shown in the figure.
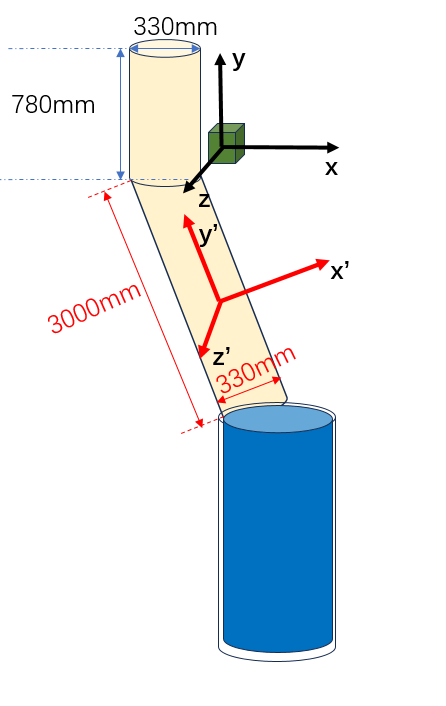
The second geometric shape is rotated 45 degrees around both the X and Y axes, and when connected to the first geometric shape, it forms a slide-like container. How should I modify my code?